




















































Το cruise control μπορεί να φαίνεται σαν μια απλή λειτουργία που βοηθά τους οδηγούς να διατηρούν σταθερή ταχύτητα. Και κάπως έτσι ήταν παλιότερα, αλλά πλέον ο λεγόμενος «αυτόματος πιλότος» μπορεί να κάνει πολλά περισσότερα.
Το είδος του σύγχρονου cruise control που γνωρίζουμε σήμερα έχει τις ρίζες του στη δεκαετία του 1940, αλλά διαδόθηκε ευρέως τα τελευταία χρόνια, όταν δόθηκε αυξανόμενη έμφαση στα συστήματα υποβοήθησης του οδηγού. Από το συμβατικό cruise control, όπου το αυτοκίνητο απλώς διατηρεί την καθορισμένη ταχύτητα, περάσαμε γρήγορα στο ενεργό (Adaptive cruise control/ACC), το οποίο μπορεί να χρησιμοποιεί ραντάρ ή κάμερες για να διατηρεί απόσταση από το προπορευόμενο όχημα. Και από εκεί στο ακόμα πιο έξυπνο «προγνωστικό» cruise control, που μπορεί μέχρι να προβλέψει αλλαγές στην κίνηση των άλλων οχημάτων και να προετοιμάζει αναλόγως το αυτοκίνητο.

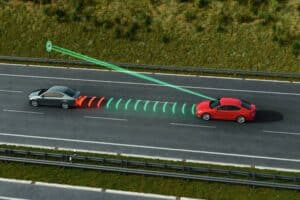
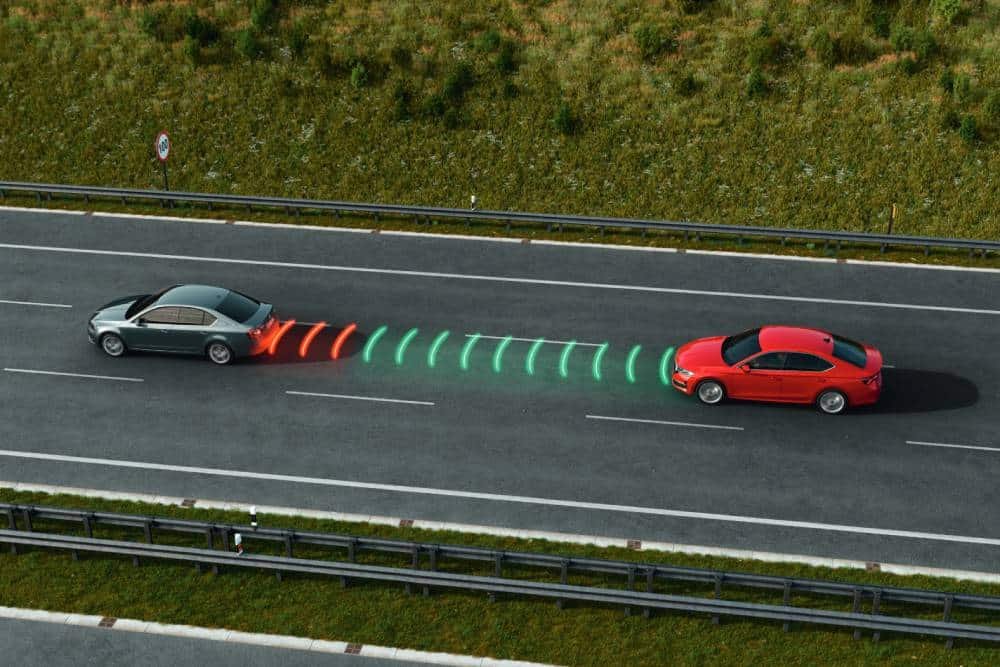
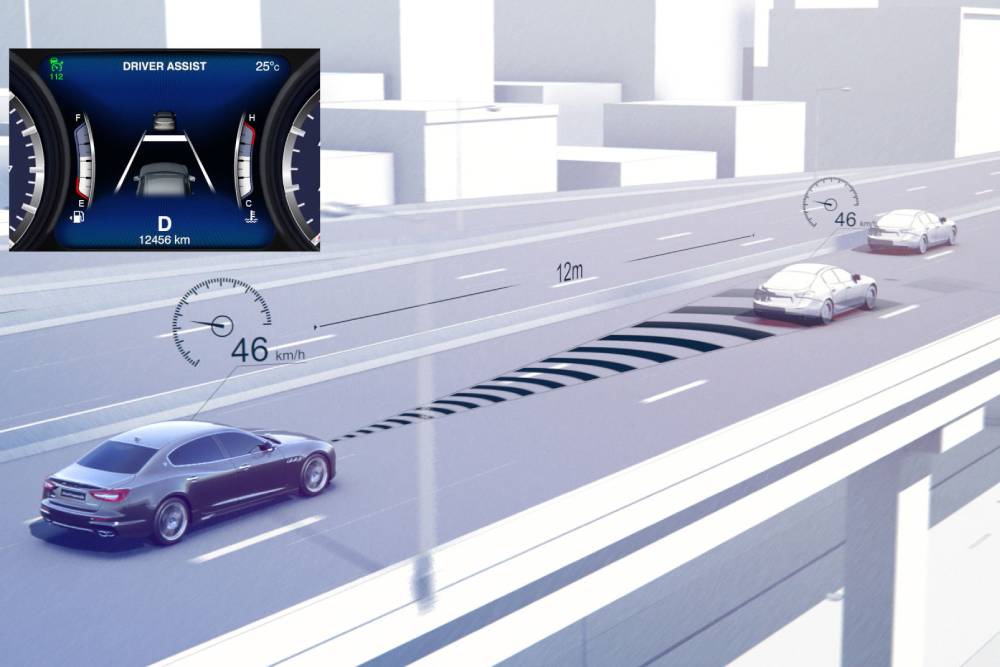
«Το κλασικό cruise control είναι μέρος της μονάδας ελέγχου κινητήρα και έχει μια απλή λειτουργία, όπου ελέγχει τον κινητήρα και προσπαθεί να κρατήσει το αυτοκίνητο σε σταθερή ταχύτητα», εξηγεί ο Ondřej Sychrovský, υπεύθυνος εξέλιξης αντίστοιχων συστημάτων στη Skoda. «Αυτή η κλασική τεχνολογία δεν συνδέεται με τα φρένα , οπότε αν πρέπει να διατηρήσει ταχύτητα στην κατηφόρα, μπορεί να το κάνει μόνο μέσω του φρεναρίσματος του μοτέρ», προσθέτει. Το ενεργό ή προσαρμοζόμενο cruise control, αντίθετα, εμφανίζεται πιο προηγμένο. Η λειτουργία του βασίζεται στη χρήση ραντάρ (στο ύψος του κεντρικού καθρέπτη, στη μάσκα ή τον προφυλακτήρα), η οποία με τη σειρά της συνδέεται με τα άλλα συστήματα του αυτοκινήτου. «Μπορεί να επιβραδύνει με τον κινητήρα και τα φρένα, να επιταχύνει, και στην περίπτωση ενός αυτόματου κιβωτίου, φυσικά, φροντίζει για την αλλαγή ταχυτήτων », λέει ο Sychrovský. Με αυτές τις παρεμβάσεις, όχι μόνο προσπαθεί να διατηρήσει σταθερή καθορισμένη ταχύτητα, αλλά και σταθερή απόσταση από το προπορευόμενο αυτοκίνητο.
Σήμερα, είναι σύνηθες το προσαρμοστικό cruise control να χρησιμοποιεί όχι μόνο δεδομένα από το ραντάρ, αλλά και κάμερες πάνω στο όχημα. «Το ραντάρ είναι καλύτερο στην παρακολούθηση κινούμενων αντικειμένων και στον υπολογισμό της απόστασης, ενώ η κάμερα είναι καλύτερη για ακίνητα αντικείμενα και τον προσδιορισμό γωνιών και την αντιστοίχιση αντικειμένων σε λωρίδες», εξηγεί ο Τσέχος τεχνικός. Χάρη σε αυτή τη συγχώνευση δεδομένων, τα προσαρμοστικά συστήματα cruise control μπορούν πλέον όχι μόνο να χειριστούν την οδήγηση σε μποτιλιαρίσματα, όταν τα αυτοκίνητα συχνά ακινητοποιούνται, αλλά μπορούν επίσης να αντιδρούν σε ακινητοποιημένα οχήματα.

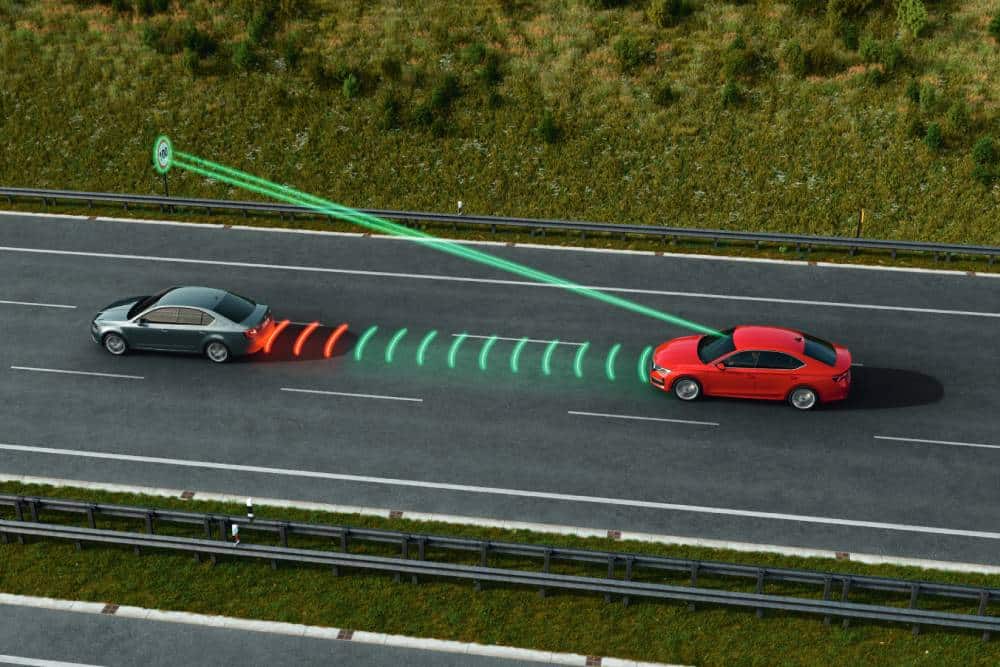
Το προγνωστικό προσαρμοστικό cruise control, τώρα, χρειάζεται δεδομένα εικόνας από την κάμερα, αλλά και δεδομένα από το GPS. Κατ’ αυτό τον τρόπο προσαρμόζει την ταχύτητα στα εκάστοτε όρια, ενώ έχει τη δυνατότητα να γνωρίζει εκ των προτέρων πού ξεκινά μια κατοικημένη περιοχή και πού βρίσκεται μια στροφή. Στη συνέχεια, η ECU υπολογίζει πότε πρέπει να αρχίσει να μειώνει την ταχύτητα για να διασφαλίσει ότι το αυτοκίνητο θα διέλθει με ασφάλεια από την καμπή ή θα μπει στην κατοικημένη περιοχή με την επιτρεπόμενη ταχύτητα.

Μια άλλη λειτουργική επέκταση του cruise control, αποτελεί η συνεργατική παραλλαγή του ACC. Εδώ έχουμε ένα προγνωστικό ACC, αλλά με δυνατότητα λήψης δεδομένων από άλλα οχήματα, μέσω της τεχνολογίας vehicle-to vehicle. Ως αποτέλεσμα, το cruise control μπορεί να λάβει προειδοποιήσεις για κυκλοφοριακή συμφόρηση νωρίτερα, από αυτοκίνητα που βρίσκονται ήδη στο μποτιλιάρισμα, και να αρχίσει να επιβραδύνει πριν οι αισθητήρες του οχήματος δουν την ακίνητη κυκλοφορία. Μπορεί επίσης να χειριστεί δύο οχήματα ταυτόχρονα, εάν αυτά μπορούν να επικοινωνούν μεταξύ τους.